
tg-me.com/data_analysis_ml/3772
Last Update:
🧭 PyCuVSLAM — быстрый и точный SLAM от NVIDIA с Python‑интерфейсом
Что такое SLAM:
SLAM (Simultaneous Localization and Mapping) — это технология, которая позволяет устройству одновременно строить карту окружающей среды и определять своё местоположение внутри неё.
Применяется в роботах, дронах, AR/VR и автономных транспортных средствах.
Что такое PyCuVSLAM:
PyCuVSLAM — это Python-обёртка над cuVSLAM, высокопроизводительным SLAM-движком от NVIDIA. Он использует CUDA-ускорение и позволяет системам в реальном времени отслеживать движение и строить карту окружающего мира.
🔧 Основные возможности:
• Аппаратное ускорение на NVIDIA GPU (включая Jetson)
• Поддержка от 1 до 32 камер + опциональный IMU
• Можно подключать обычные RGB-камеры, камеры глубины и сенсоры движения
• Работает в конфигурациях от простой однокамерной до мультисенсорных систем
• Удобный Python API — быстро подключается и настраивается
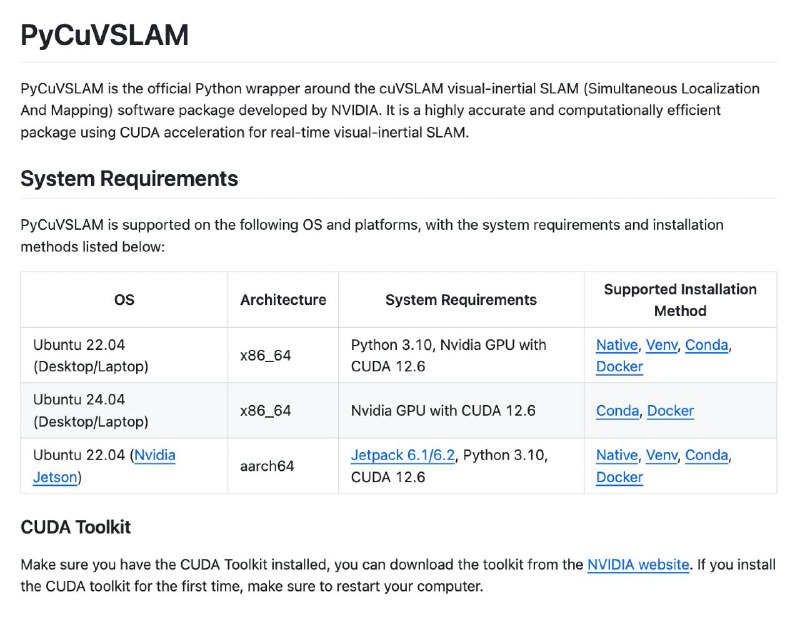
💻 Установка:
• Поддерживает Ubuntu 22.04+, Python 3.10, CUDA 12.6
• Устанавливается через pip, Docker или запускается на Jetson
• Есть готовые примеры для быстрой работы
🧠 Для кого:
• Разработчики роботов, дронов, AR/VR
• Те, кому нужен точный и быстрый SLAM без глубокой настройки
📌 GitHub
BY Анализ данных (Data analysis)
Share with your friend now:
tg-me.com/data_analysis_ml/3772